{kind=link}

What is the DC series motor?
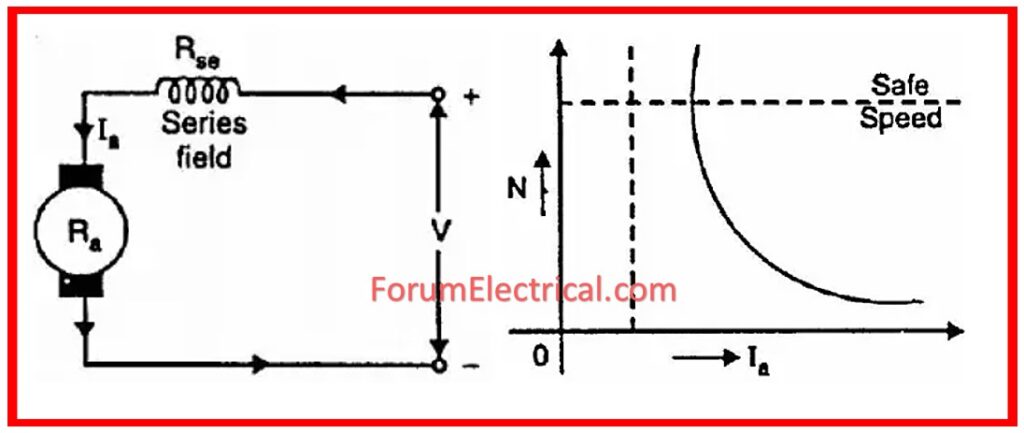
Speed Current Characteristics of DC Series Motor
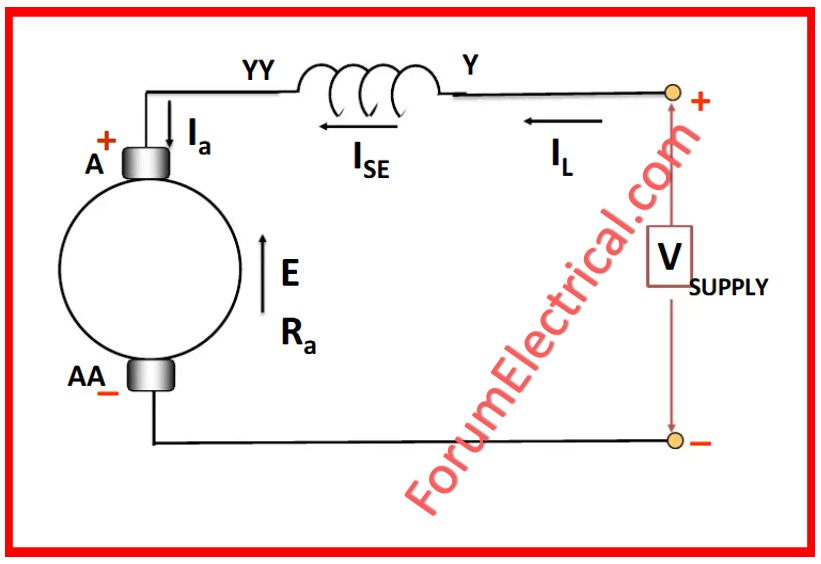
In a DC Series Motor, the field winding and the armature winding continue to be connected in series simultaneously.
Because of this, the current that flows through the Armature and the Field coil will be completely identical.
Therefore, if Ia is the current through the armature, then Ia also be the current by the field. If saturation and armature reaction are not taken into consideration, then the magnetic flux that is generated by the field winding of a DC series motor will be directly proportional to the armature current Ia during the process.
Therefore, we can express for DC Series Motor,
The main flux, denoted by Ø, is denoted by KIa,
Where
K – Constant.
If a DC voltage of V is put across the terminals of a DC series motor, then the following will occur:
V = Ea +Ia (Ra+Rs)
Let the above equation be expressed as equation (1)
Where
Ea – Back emf of the armature
Ra – Resistance of the armature winding.
Rs – Resistance of the Series Field Winding of a DC Series Motor
According to equation (1),
Ea = V- Ia (Ra+Rs)
However,
Ea = Ka Øωm
Where
ωm represents the rotational speed of the DC Series Motor &
Ka represents the constant.
Thus,
Ka Øωm = V- Ia (Ra+Rs)
ωm = [V- Ia (Ra+Rs)]/Ka Ø
ωm = [V- Ia (Ra+Rs)]/Ka x KIa (Since Ø = KIa)
Let the above equation be expressed as equation (2)
Therefore, it is clear from equation (2) that the speed of a DC Series Motor is inversely proportional to the armature current Ia.
Assuming that the DC Series Motor is started with no load, the DC Series Motor will need only a small amount of current from the supply mains.
This is because the input power required is just sufficient to compensate for the losses that occur when there is no load.
When there is no load on the DC Series Motor, it is reasonable to assume that the current is nearly zero, denoted by Ia which is approximately 0.
For this reason, based on equation (2),
By observing the Speed Current Characteristics of DC Series Motor, it is apparent that the speed of the DC Series Motor, denoted by the symbol ωm, is extremely high.
Therefore, if the DC Series Motor is started with no load, the speed of the DC Series Motor will increase to an unsafe level, which will certainly result in damage to the DC Series Motor.
Taking this into consideration, the DC Series Motor must always be started & run when it is mechanically coupled to it so that it can function.
Why small amount of current and why not high current?
This is due to the fact that the torque demand will be low when there is no load attached to the motor.
Now that the torque need is low, the speed will be higher since the speed is inversely proportional to the main flux, but the torque is directly proportional to the main flux.
Because of this, the back EMF will be larger as the speed increases, which means that there will be a greater resistance to the flow of current from the supply to the motor.
As a result, the current will be lower when there is no load.
Why Series Motor is never started on No Load?
It is not possible to start a DC series motor when there is no load.
It was previously observed that the load is the factor that determines the motor armature current.
The armature current that the motor draws is extremely low when there is either a light load (or) no load at all.
In the case of a direct current (DC) series motor, the values of
Ø α Ia
and
on no load since Ia is low, and as a result, the flux that gets generated is also very low.
When the speed equation is considered,
N α 1/ Ø
Where
Eb – constant.
Therefore, when there is a very weak load or no load at all because the flux is very small, the motor will attempt to run at a speed that is dangerously high, which causes the motor to be damaged mechanically.
This might be seen from the speed-armature current & the speed-torque characteristics, which demonstrate that when the armature current and torque are both low, the motor has a tendency to revolve at a speed that is dangerously high.
This is the reason why a series motor should not be started under conditions of small loads or no load under any circumstances.
For this reason, it is not used for belt drives since the act of breaking (or) slipping the belt causes the entire weight to be thrown off on the motor, which results in the motor being forced to run with no load, which is an unsafe condition.