
What is a Stepper Motor?
A stepper motor is an electric motor that works on the basis of electromagnetic energy. It is intended to convert electrical pulses into discrete steps, resulting in an essential component in a variety of applications that demand accurate positioning & control.
- What is a Stepper Motor?
- Working Principle of Stepper Motor
- Construction of Stepper Motor
- Driving Modes of Stepper Motor
- Types of Stepper Motor
- 1). Permanent Magnet Stepper Motor
- 2). Variable Reluctance Stepper Motor
- 3). Hybrid Synchronous Stepper Motor
- Characteristics of Stepper Motor
- 1). Dynamic Characteristics
- 2). Static Characteristics
- Features of Stepper Motor
- How to Select a Stepper Motor?
- Advantages of Stepper Motor
- Disadvantages of Stepper Motor
- Applications of Stepper Motor
- Difference between Stepper Motor and DC Motor
- Stepper Motor vs DC Motor
- Difference between Stepper Motor and Servo Motor
- Stepper Motor vs Servo Motor
- What is the principle of a 2-Phase Stepper Motor?
- Conclusion
As long as the motor is properly sized for the application, it is possible to easily regulate its position without the use of a feedback device.
Stepper motors use IEC 60034, which is for rotating electrical machinery. Specific stepper motor requirements may require additional manufacturer specs or application guidelines.
Stepper motors function similarly to switching reluctance motors. When a pulse of energy is applied to the motor shaft, the stepper motor employs the magnet operation principle to turn it a precise distance. The stator has eight poles, whereas the rotor has six.
To accomplish one full rotation, the rotor needs 24 electrical pulses. Another way to put it is that for each pulse of power that the motor gets, the rotor moves exactly 15 degrees.
Working Principle of Stepper Motor
Stepper motors are brushless DC motors that revolve in steps.
This is extremely valuable since it can be accurately positioned without the usage of a feedback sensor, essentially representing an open-loop controller.
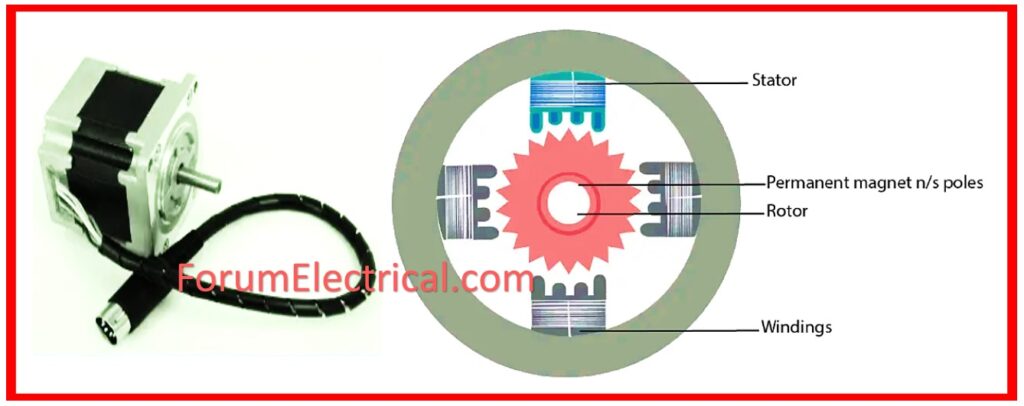
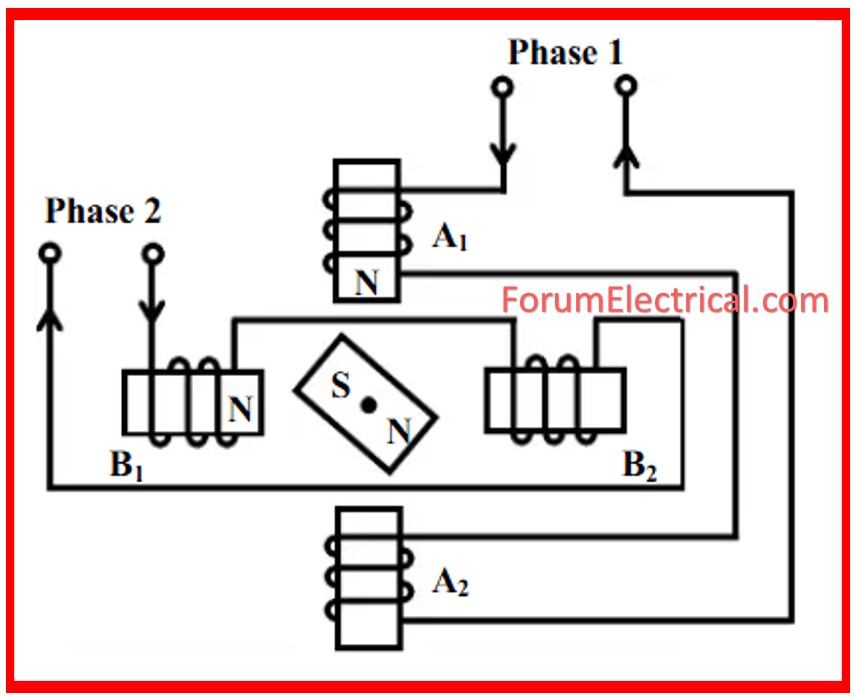
The rotor of the stepper motor, which is typically a permanent magnet, is encircled by stator windings. The motor that is used in steppers is a 2-phase motor.
As we activate the windings in a specific order and allow current to flow through them, they magnetize the stator and form electromagnetic poles, resulting in motor propulsion.
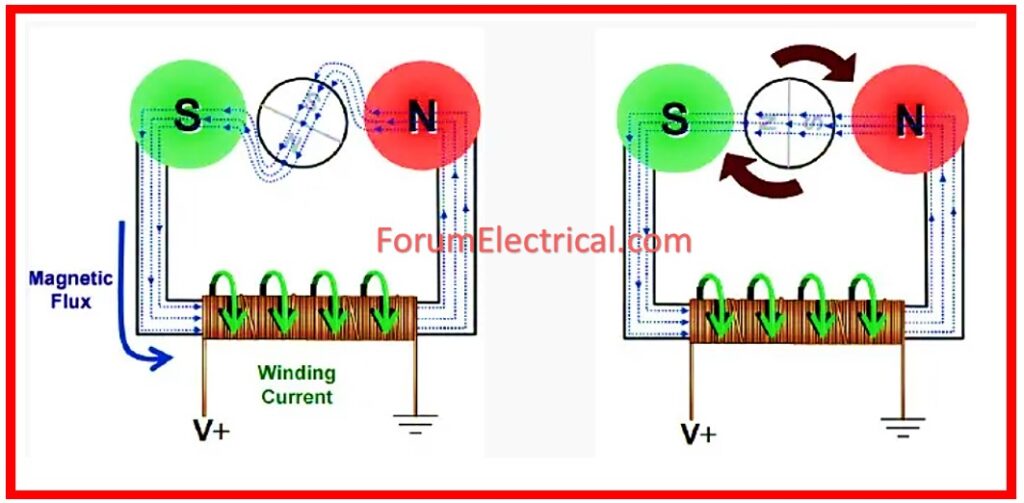
So, this is the basic working principle of stepper motors.
Construction of Stepper Motor
A stepper motor includes 2 primary components:
- Stator and
- Rotor.
Stator: One of the components of the motor that is stationary is called the stator. It consists of coils twisted around the poles. When electric current is applied to these coils, they produce a magnetic field. The stator configuration may vary depending on the type of stepper motor. But it covers the rotor & creates the magnetic field required for movement.
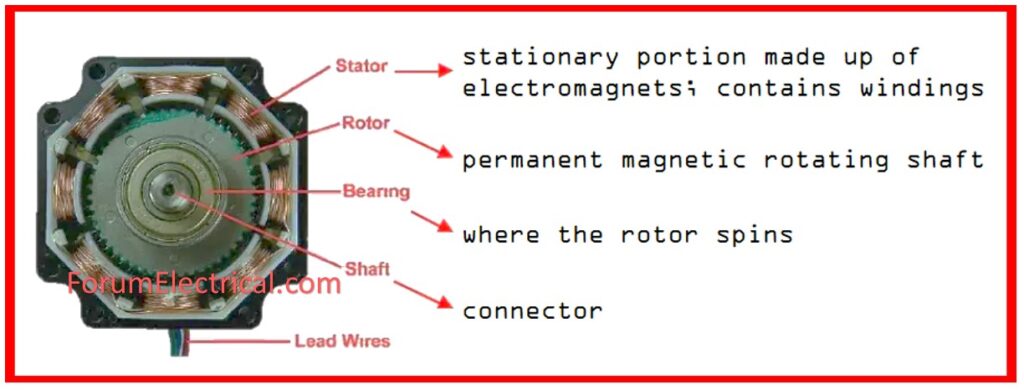
Rotor: A motor’s rotor is the component that is responsible for movement. It consists of a shaft & permanent magnets grouped in predetermined patterns. The permanent magnets interact with the stator’s magnetic field, causing the rotor to move in discrete steps.
The driver controls the stepper motor. The driver receives electrical pulses from the microcontroller (or) other control devices & translates them into voltage and current levels that energize the stepper motor’s coil.
Controlling the sequence & timing of the electrical pulses allows the stepper motor to rotate in accurate & discrete steps.
The number of rotor teeth and stator tooth arrangement determine the size of the stepper motor’s discrete steps (or) the amount of rotation per step.
Stepper motors typically have step widths of
- 1.80 (1.8 degrees),
- 2.50 (2.5 degrees), &
- 7.50 (7.5 degrees).
Driving Modes of Stepper Motor
There are numerous techniques to drive the stepper motor.
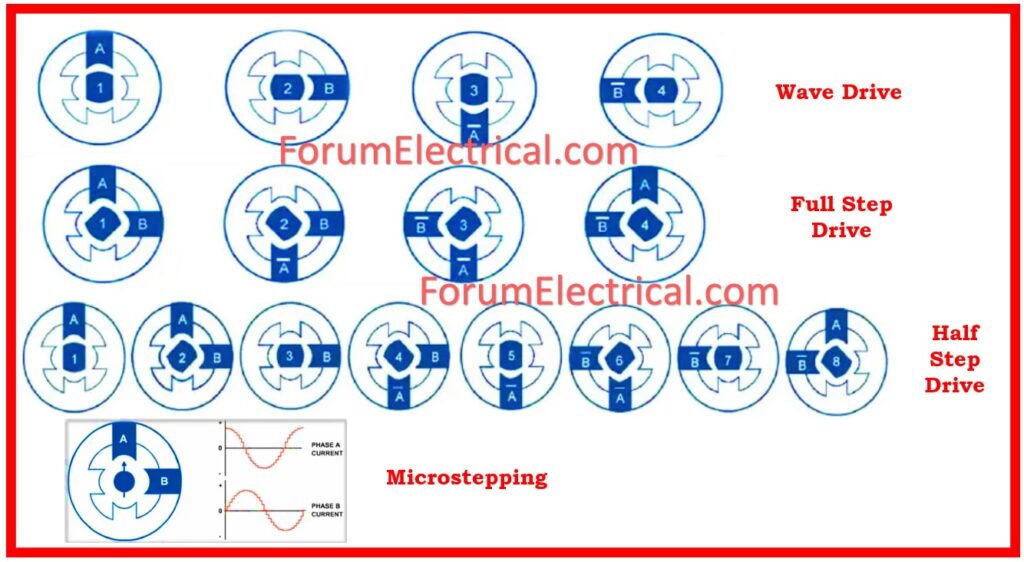
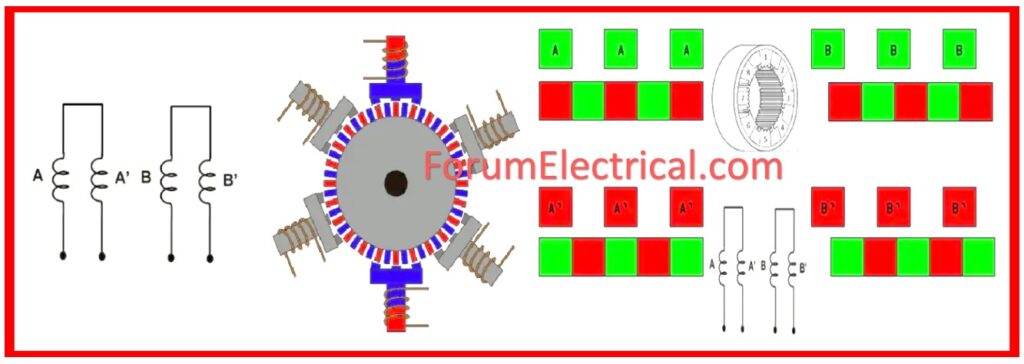
1). Wave Drive (or) Single-Coil Excitation: Wave Drive, often commonly referred to as single-coil excitation, is the first type of drive. In this mode, we activate only one coil at a time, which implies that for this example of a four-coil motor, the rotor will complete one full cycle in four steps.
2). Full Step Drive: The next mode is Full step drive, which produces significantly more torque because there are always two active coils at any given moment. However, this does not improve the stepper’s resolution, and the rotor will still complete a full cycle in four steps.
3). Half Step Drive: We use Half Step Drive mode to increase the stepper’s resolution. This mode combines the previous 2 modes.
We have 1 active coil immediately following two active coils, and so on. So, using this mode, we get twice the resolution with the identical design. Now, the rotor will complete its full cycle in eight phases.
4). Microstepping: However, the most popular method of controlling stepper motors today is microstepping.
In this mode, we apply variably regulated current to coils in the shape of a sine wave. This ensures smooth rotor motion, reduces part stress, and improves stepper motor precision.
5). Number of Poles: Another technique to increase the stepper motor’s resolution is to increase the number of rotor poles and stator poles.
Types of Stepper Motor
The 3 major types of stepper motors are:
- Permanent Magnet Stepper Motor
- Variable Reluctance Stepper Motor
- Hybrid Synchronous Stepper Motor
1). Permanent Magnet Stepper Motor
Permanent magnet motors employ a (PM) permanent magnet in rotor & work by attracting (or) repelling electromagnets in the stator.
This is the most prevalent type of stepper motor when compared to other varieties on the market.
The motor is constructed with permanent magnets. This type of motor is also referred as the tin-can or can-stack motor.
The key advantage of this type of stepper motor is lower manufacturing costs. Every rotation has 48-24 steps.
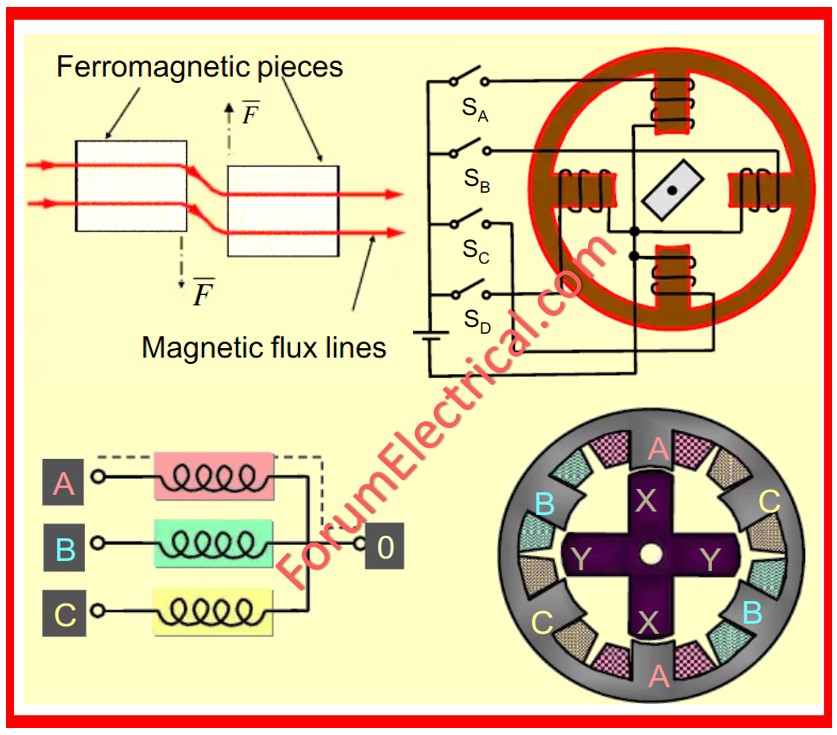
2). Variable Reluctance Stepper Motor
(VR) Variable Reluctance motors have a simple iron rotor and operate on the concept that minimum reluctance comes with minimum gap, attracting the rotor points to the stator magnet poles.
The stepper motor, with variable reluctance, is the most basic type of motor & has been used for many years.
As the name implies, the angular position of the rotor is primarily determined by the magnetic circuit’s reluctance, which can build between the stator’s teeth & the rotor.
3). Hybrid Synchronous Stepper Motor
The term “hybrid stepper motor” refers to the use of both permanent magnet (PM) & variable reluctance (VR) approaches to obtain maximum power in small (very small) package sizes.
The hybrid stepper motor is the most popular type of motor because it performs well when compared to a permanent magnet (PM) rotor with regards to of speed, step resolution, & torque.
This stepper motor costs more than PM stepper motors.
This motor combines PM and VR stepper motor characteristics.
These motors are used to lower the stepping angle to 1.5, 1.8, (or) 2.5 degrees.
Characteristics of Stepper Motor
An essential consideration in the use of stepper motors is if the motor properties are appropriate for the operating conditions.
The two primary characteristics of stepper motor performance are:
- Dynamic Characteristics
- Static Characteristics
Dynamic Characteristics: These are the characteristics of stepper motors that are responsible for starting & rotating, and they are the primary factors that influence the movement and cycling time of the machinery.
Static Characteristics: These are the changes in angle that occur when the stepper motor is in stand-still mode, affecting machinery’s level of accuracy.
1). Dynamic Characteristics
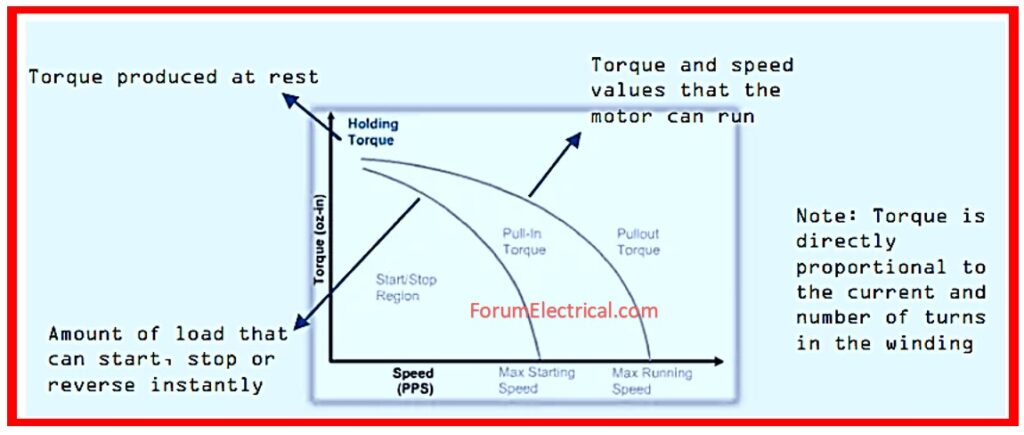
- Speed – Torque Characteristics: The motor and driver influence the speed-torque characteristics & the type of driver that is used has a significant impact.
- Maximum holding torque (TH): When power is applied (at rated current) while the stepper motor is not moving, the maximum holding torque is maximum holding power (torque) that the motor can hold.
- Pullout Torque: This torque is referred to as the pullout torque, and it is the highest torque that can be produced at a particular speed. Make sure the necessary torque is within this range when choosing a motor.
- Maximum Starting Frequency (fS): When the stepper motor’s friction load and inertial load are zero, this is the highest pulse speed at which the motor may start or stop quickly (without an acceleration/deceleration delay). Acceleration or deceleration must be done gradually if the motor is being driven at a pulse speed higher than this rate. When the motor is subjected to an inertial load, this frequency will drop.
2). Static Characteristics
- Angle – Torque Characteristics: When the motor is excited at rated current, the angle-torque characteristics illustrate the link between the rotor’s angular displacement and the torque supplied externally to the motor shaft.
- Stable Points: Points where rotor stops, where the rotor and stator teeth line up accurately. Because of its great stability, if no outside force is applied, the rotor will continually stop at these positions.
- Unstable Points: Points where the alignment of the rotor and stator teeth is half a pitch off. At these points, even the smallest external force will cause a rotor to move to next stable point to left (or) right.
Features of Stepper Motor
- The stepper motor can adjust the rotation angle, allowing for high-precision placement.
- Stepper motors provide consistent torque at low speeds, making them ideal for slow-moving machinery.
- Stepper motors use precise electrical impulses to maintain a steady rotational speed.
- Stepper motors can create strong torque even when stationary, making them ideal for devices that require clamps to stay in place.
How to Select a Stepper Motor?
Before choosing a stepper motor for the specific requirements, you should carefully evaluate the motor’s torque-speed curve.
So, this information is available from motor’s designer, and it is a graphical representation of the motor’s torque at a specific speed.
Motor torque-speed curves must match application requirements to achieve system performance.
Advantages of Stepper Motor
- It operates in any condition.
- The reliability is great.
- The motor’s rotation angle is proportional to its input pulse.
- Precise positioning and movement repeatability are possible because efficient stepper motors possess an accuracy of 3 – 5% of a step, and this inaccuracy does not accumulate from one step to next.
- Excellent reaction to start, stop, and reverse.
- The motor is extremely reliable because there are no contact brushes. As a result, the motor’s life is solely determined by the bearing’s lifespan.
- The motor’s response to the digital input pulses enables open-loop control, making it easier and less expensive to regulate.
- It is feasible to accomplish very low-speed synchronous rotation using a load directly linked to the shaft.
- Since input pulse frequency determines speed, a large range of rotational speeds is possible.
- At a standstill, the motor produces full torque.
- Ruggedness
- Simple structure.
- Can operate in an open-loop control system.
- Maintenance is low.
Disadvantages of Stepper Motor
- Low torque compared to inertia ratio and high noise levels.
- If the motor is not adequately controlled, resonances may occur.
- It is difficult to operate this motor at high speeds.
- Efficiency is low.
- Motor torque decreases rapidly with speed, and accuracy is low.
- Feedback is not used to indicate potential missed steps.
- The separate control circuit is necessary.
- It requires more current than DC motors.
Applications of Stepper Motor
- Stepper motors are used in the following applications.
- Stepper motors are utilized in automotive gauges & automated manufacturing equipment.
- Innovative surveillance products for the security industry.
- Medical scanners, digital dentistry photos, samplers, respirators, fluid pumps, and blood analyzers employ stepper motors.
- Cameras use stepper motors to automatically focus and zoom.
Difference between Stepper Motor and DC Motor
Stepper Motor vs DC Motor
| Parameters | Stepper Motor | DC Motor |
| Control Feature | Simple & uses a microcontroller. | Simple & no changes necessary. |
| Speed | Low speed range (200-2000 RPMs). | Moderate |
| Efficiency | Low efficiency | High efficiency |
| Reliability | Highly reliable | Moderately reliable |
| Cost | Low | Low |
| Torque (or) Speed Characteristics | Highest torque for low speed. | High torque for low speed. |
| Application | Stepper motors are used for a variety of position control applications, including printers, robotics & hard disk drives. | DC motors are widely employed in a variety of applications, including toys, cranes, computers, culinary appliances, & lifts. |
Difference between Stepper Motor and Servo Motor
Stepper Motor vs Servo Motor
| Parameters | Stepper Motor | Servo Motor |
| Control System | Stepper motors use an open-loop system, implying they move in discrete steps in response to an input pulse. It does not use feedback mechanisms to control its movements. | The servo motor runs in a closed-loop system. Its mobility is entirely dependent on the controller. The controller monitors the motor’s position via feedback systems & adjusts its movement to meet the intended position. |
| Accuracy | Stepper motors give great accuracy in positioning because of its ability to move in short (discrete) increments. Yet, without a feedback system, it can lose its step under severe loads, resulting in lower accuracy. | Servo Motor has excellent accuracy because of the feedback mechanism that assures motor achieves the exact position ordered by the controller. The servo motor may achieve high levels of accuracy even under strong load conditions, resulting in great accuracy. |
| Speed & Torque | Stepper motors generate great torque at low speeds but lose torque as speed increases. This feature makes stepper motors ideal for applications that demand low-speed, high-torque action. | Servo Motor can maintain high torque over an extensive variety of speeds. As a result, servo motors are ideal for applications requiring both high torque & high speed movement. |
| Holding Torque | Stepper Motor naturally produces high holding torque even when motionless. It qualifies them for conditions where keeping position is more essential than speed & power. | Servo motors require continuous electricity to sustain holding torque. Furthermore, the feedback mechanism controls this torque. As a result, they are unsuitable for applications that demand continuous employment. |
| Cost | The stepper motors cost is relatively low. | Servo motors are costly. |
| Response Time | Stepper motors have a slower response time than servo motors because they lack a feedback system. It is completely based on consecutive step movement. As a result, stepper motors are not appropriate for applications that need quick acceleration & deceleration. | Servo Motor, because of the feedback system, it responds swiftly and can accelerate & decelerate as needed. This makes them ideal for applications requiring quick acceleration & deceleration. |
| Applications | 3D printers, textile machines, welding machines, medical equipment, and other applications all employ stepper motors. | Servo motors are widely employed in remote-controlled equipment, antenna positioning systems, robots, industrial automation, and cameras. |
What is the principle of a 2-Phase Stepper Motor?
When running a 2-phase stepper motor, full current energizes the windings, causing the motor to move in full-step increments.
This motion is obtained when the drive completes one full step. A 2-phase stepper motor is comparable to a single-phase motor in terms of design and operation.
Conclusion
Stepper motors use open loop control for accurate positioning without sophisticated feedback devices.
Stepper motors are ideal for 3D printing & CNC machining, where dependability and cost-effectiveness are essential. They can hold positions without electricity.
The closed-loop control system of servo motors uses feedback to assure precision and adaptability. High speed, torque, and dynamic motor position modifications are also available from servo motors.
This makes them excellent for advanced automation, robotics, & high-performance CNC machinery.
Thus, understanding the pros and cons of each motor type helps engineers and designers choose between stepper and servo motors to optimize system performance and efficiency.









{kind=link}