
Choosing a motor is the most difficult task, as it is determined by design requirements such as cost, torque, acceleration, positional accuracy, power, and other factors.
DC, Servo, and Stepper motors are offered for a variety of applications.
However, servo motors operate quickly, have a high torque, and rotate accurately.
Actually, stepper motors are a high-performance alternative to the servo.
However, setting up a stepper is more involved than setting up a servo motor.
This post gives you additional information on servo motors, including their operation, construction, mechanism, types, and applications.
What is a Servo Motor?
Servos are electromagnetic devices that use a negative feedback mechanism to turn an electric signal into controlled motion.
Essentially, servos function as actuators, providing exact control over velocity, acceleration, & linear (or) angular position.
It comprises of four components:
- A DC motor,
- A position sensor,
- A gear train, &
- A control circuit.
The gear mechanism attached to the motor delivers feedback to position sensor.
If the servo motor is powered by direct current, it is known as a DC servo motor, and if it is powered by alternating current, it is known as an AC servo motor.
The gear of a servo motor is often made of plastic, but in high power servos, it is constructed of metal.
Servo motors are manufactured by a number of firms, including
- HITECH,
- FUTABA,
- AIRTRONICS, and
- JR RADIOS.
They are manufactured the same way, but have different connector types, wire colors, and so on.
There are several varieties of servos available on the market, including AC, DC, continuous, positional, and linear servo motors.
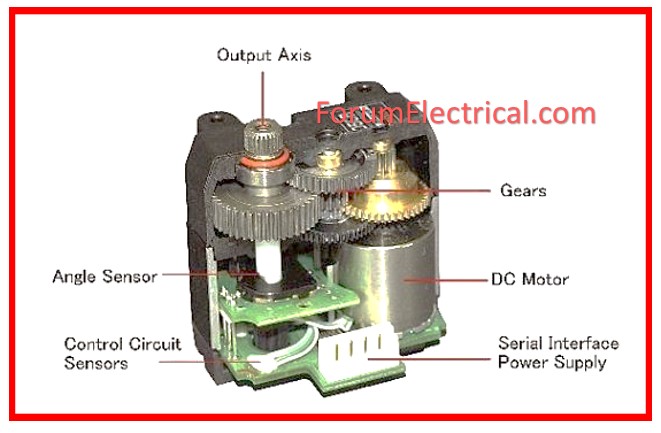
Construction of Servo Motors
The servo motor is a DC motor that consists of the following five parts:
- Stator winding: Stator winding refers to the winding on the motor’s stationary portion. It is sometimes referred to as field winding of a motor.
- Rotor Winding: This sort of winding is applied to the motor’s rotating parts. It is often referred to as the armature winding of the motor.
- Bearings: There are two types of bearings: font bearings and back bearings, which are utilized to move the shaft.
- Shaft: The motor’s armature winding is connected to an iron rod, forming the shaft.
- Encoder: The encoder has an approximate sensor that measures the motor’s rotational speed and revolutions per minute.
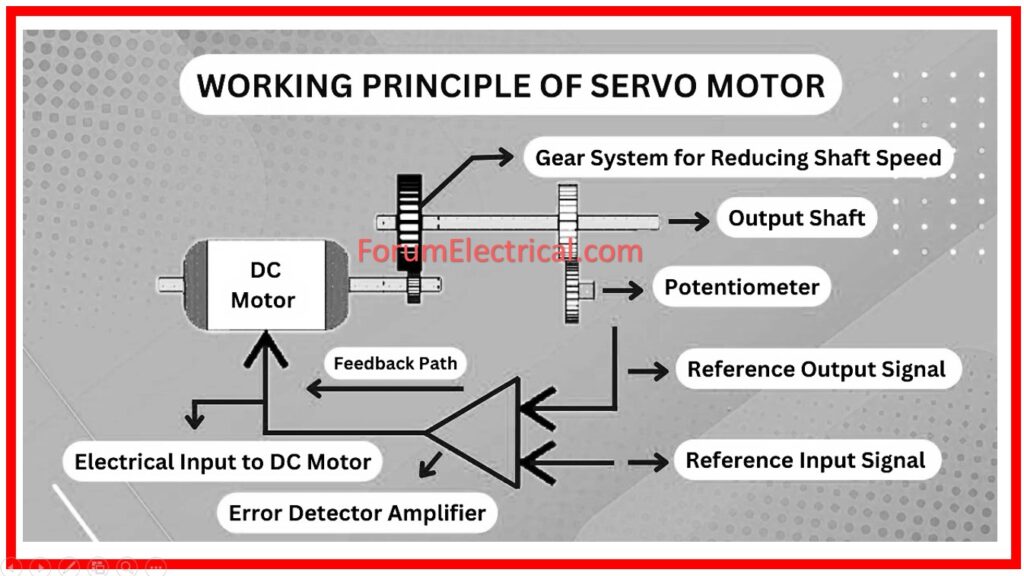
Working Principle of Servo Motor
It has three fundamental types:
1). Controlling Device.
2). Output Sensor.
3). Feedback system.
The servo motor operates on the principle of automatic closed-loop systems. A controller is needed for this closed-loop system.
This controller consists of a comparator & a feedback path. It features a single output & two inputs. In this case, the comparator is utilized to compare the required reference signal before producing an output signal, which is perceived by the sensor.
The input signal for the motor is known as a feedback signal. The motor starts to work in response to the feedback signal. The comparator signal is referred to as the motor’s logic signal.
When the logical difference is greater, the motor is turned on; when the difference is less, the motor is turned off.
Essentially, a comparator determines whether the motor is on or off.
An adequate controller can help to ensure that the motor functions properly.
Servo motors may be controlled using PWM (Pulse Width Modulation).
These deliver electric signals with varying widths to the motor. The pulse width is changed between 1 and 2 milliseconds and transferred to the servo motors 50 times per second. The width of the pulse determines the angular location of the rotating shaft.
Three terms are used to describe the control of the servomotor:
- Maximum pulse,
- Minimum pulse, and
- Repetition rate.
Each servo motor contains three cables or leads. The first two wires connect the positive and ground supplies, while the third wire controls the signal.
Working of Servo Motors
The servo has
- A position sensor,
- A DC motor,
- A gear system, and
- A control circuit.
When powered by a battery, the DC motor runs at a high speed but with little torque. This speed is slower and produces more torque than a gear & shaft assembly coupled to a DC motor.
The position sensor detects the shaft’s precise position and sends information to the control circuit.
The control circuit decodes the information from the position sensor and determines the direction of rotation to obtain the right position. It requires a DC source of 4.8 to 6 volts.
The reduction gearbox is attached to a shaft, which reduces the motor’s RPM.
The reduction gearbox’s output shaft is identical to that of a motor linked to an encoder or potentiometer.
The encoder’s output is then linked with the control circuit. The cables from the servomotor are also linked to the control circuit.
The microprocessor controls the motor by providing signals in the form of PWM, which recognizes the control circuit and rotates the motor at the desired angle.
The control circuit pushes the motor clockwise or anticlockwise, causing the shaft to revolve in the desired direction.
The encoder transmits the feedback signal to the control circuit. When the motor reaches the required angle, the control circuit stops it using the signals obtained from an encoder.
Advantages of Servo Motors
- When a strong load is applied to the motor, the driver increases current to the coil to rotate it.
- Servo motors allow for high-speed operation.
Disadvantages of Servo Motors
- Higher cost.
- Unsuitable for precise rotation control due to latency in response to commands.
Applications for Servo Motors
- They regulate lift positioning and movement in radio-controlled aircraft.
- They function as a crucial part in robot information due to their smooth switching and precise positioning.
- They maintain hydraulic fluid in aerospace systems.
- These are also utilized in radio-controlled toys.
- They extend or replay disc trays in electronic devices like DVD and Blu-ray players.
- They help maintain vehicle speed in the automotive industry.
Types of Servo Motors
Based on Rotation
- Positional Rotation Servo Motor: These servos can rotate the shaft in approximately half of the circle. It also features a function that prevents the rotational sensor from over rotating. Positional servos are widely utilized in limbs, robotic arms, & a variety of other applications.
- Continuous Rotation Servo Motor: They are built similarly to positional servos. However, it can move in both clockwise & anticlockwise orientations. Radar systems and robotics both employ these types of servos.
- Linear Servo Motor: Similar to positional servos, linear servos use additional gears to switch between circular and back-and-forth output. These servos are utilized in high-end model aeroplanes and are difficult to locate in stores.
Basis of Operating Signal
- Analogue Servo Motors: Analogue servos are controlled via PWM (Pulse Width Modulation) signals. The signal ranges from 4.8V to 6V. When this type of servo is not in motion, the PWM is turned off. The torque created during rest time renders the starting time inactive. Also, an analogue servo can only send 50 pulses every second.
- Digital Servo Motors: Using tiny microprocessors. Digital Servos receive signals and respond to high-frequency voltage pulses. A digital servo can send 300 pulses per second, which is a much higher rate than an analogue servo. Because of its quicker pulse, digital servos provide a smooth reaction and consistent torque. Digital servos require more power than analogue servos.
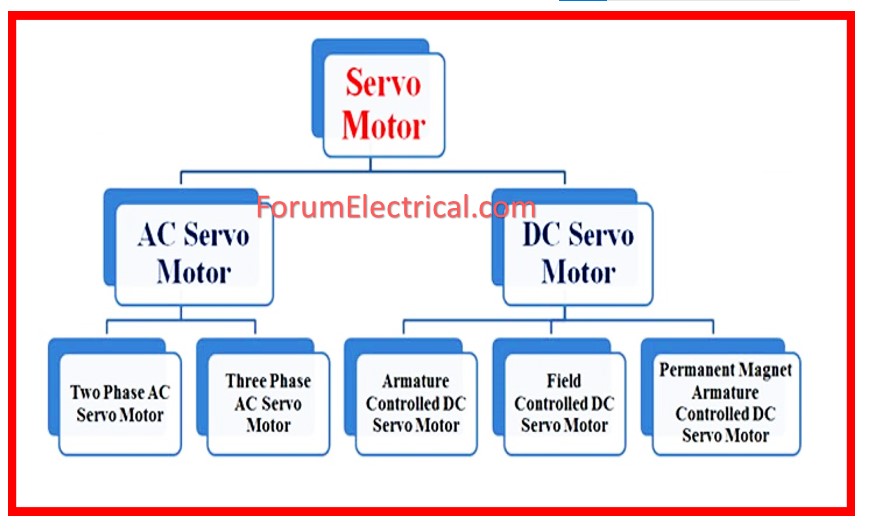
Basis of Operational Power
- DC Servo Motor: DC Servos, also known as permanent magnet DC motors or individually stimulated DC motors, provide quick torque response. The torque & flux are decoupled, which allows for quick torque response. As a result, even minor variations in armature voltage (or) current can cause a significant movement in the shaft’s position or speed. DC servos are the most widely used form of servo motor.
- AC Servo Motor: There are two types of AC servo motors: two-phase and three-phase. For low-power applications, two-phase squirrel cage servo motors are most commonly employed. In addition, high-power systems use three-phase squirrel cage servos.


{kind=link}